Vincent Vanhoucke is Google's chief scientist, Ph.D. in Electrical Engineering from Stanford University, and currently leads robot-related projects at Google Brain. Vanhoucke's main research areas are speech recognition, computer vision and robotics. He is also about to host the conference on Robot Learning, CoRL 2017 (Conference on Robot Learning).
Vanhoucke believes that machine intelligence has now evolved to a fairly high level, and that performance in certain situations can rival (or even surpass) humans, such as machine vision, machine translation, speech recognition, and it is time to make these capabilities in the physical world. Play the effect. In his speech today, he mentioned that the research of roboTIcs is now facing a deep learning innovation. To achieve this, the current machine learning practitioners need to jump out of the comfort zone of supervised learning, facing some difficult problems: data scarcity How to make the machine achieve skill conversion and continuous learning and so on. Vanhoucke also mentioned that this is also the only way for artificial intelligence to go from theory to practice.
Vanhoucke introduced his research in the fields of image, speech (and machine translation) and robots (mainly robotic grabbing). Partial glare
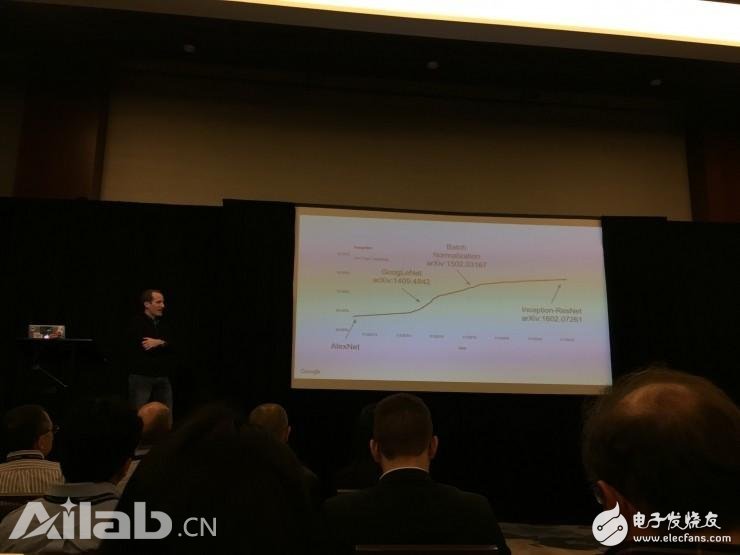
Vanhoucke said that in 2011, speech recognition researchers used neural network technology to reduce speech recognition, and the error rate was greatly reduced. It is the biggest advancement in the field of speech recognition for more than a decade; in 2016, it has almost reached the human level.
Machine translation, the introduction of machine learning in 2014 also made a qualitative advancement in machine translation, but it is still relatively reluctant to reach human standards...
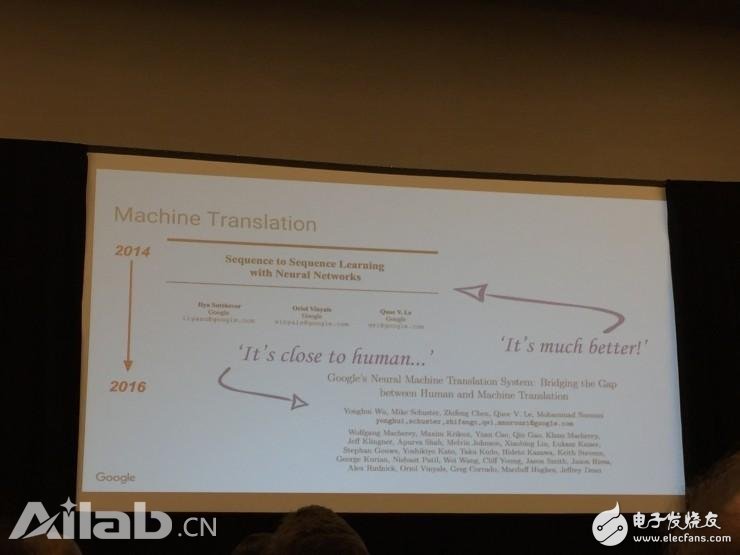
(Look at the list on the keynote and contribute to Google's machine translation. There are a lot of Chinese.)
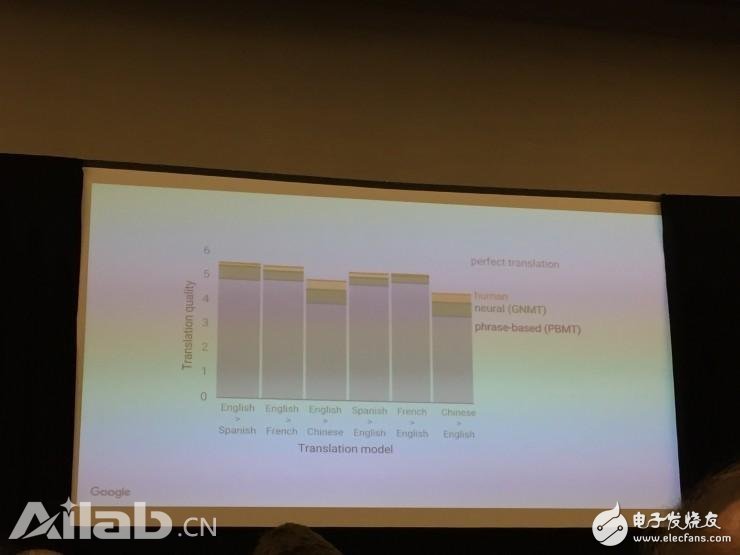
This histogram is the quality difference between human translation, neural network translation and PBMT translation, which is successively decreasing.
Vanhoucke believes that machine learning research is easier than in the past, with more open source tools and models, more web tutorials (he started his own online course on Udacity), and the threshold for GPU and high-performance computing hardware has also dropped. The researchers are more than before.
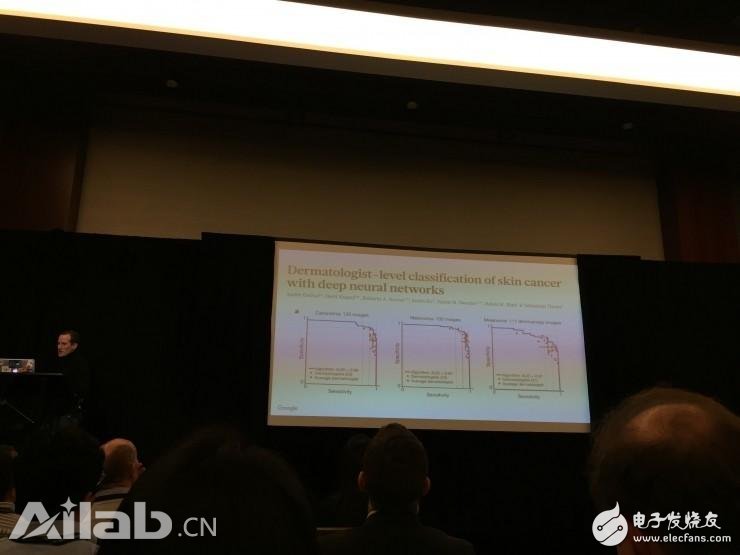
In the field of picture recognition, in addition to the improvement of the underlying technology, Google has applied picture recognition technology to the medical field to help doctors diagnose the disease and achieve some results.
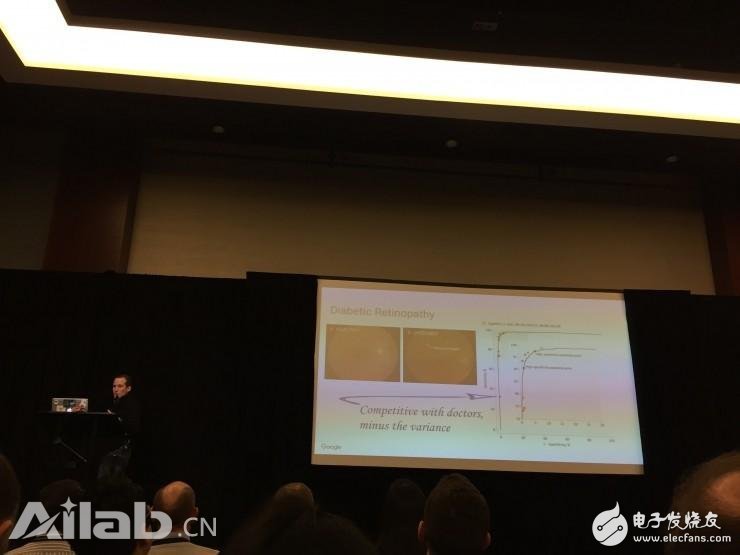
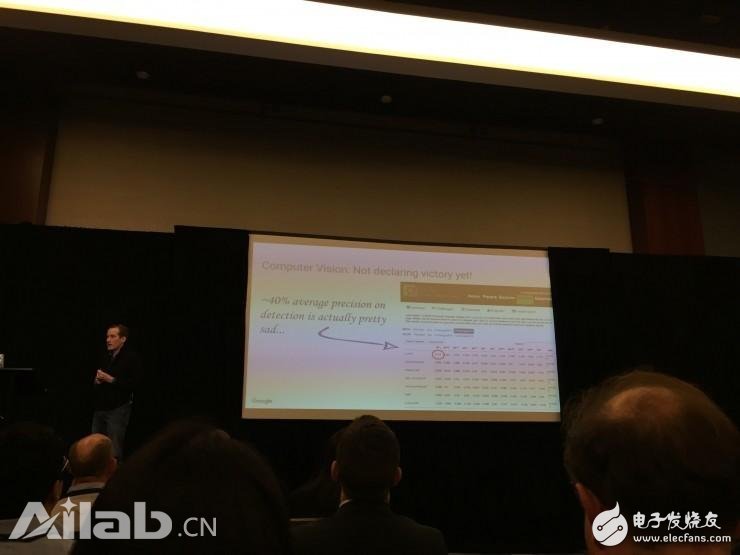
But he also said that image recognition is far from the point of "succes", and 40% of the decisions based on image monitoring are very bad.
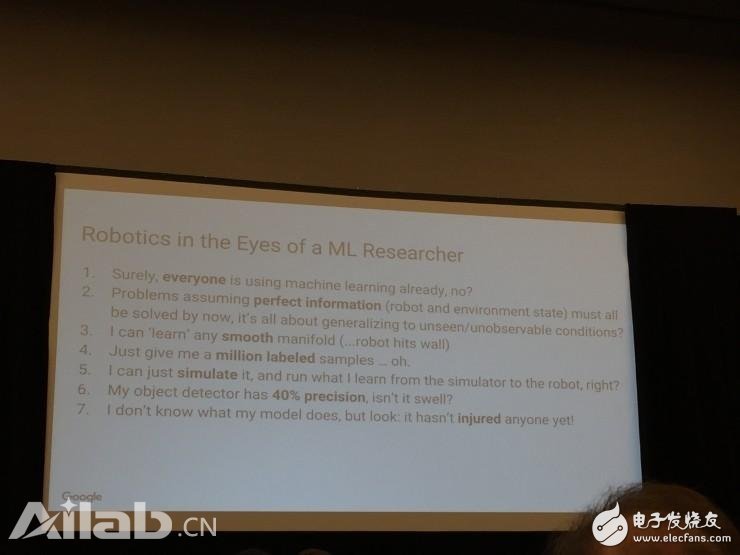
Next is the part of the robot. Vanhoucke is a major in electrical engineering and the main job at Google Brain is the robotics project. He first emphasized a point of view that is inconsistent with many people's perceptions: current robot research has little to do with deep learning.
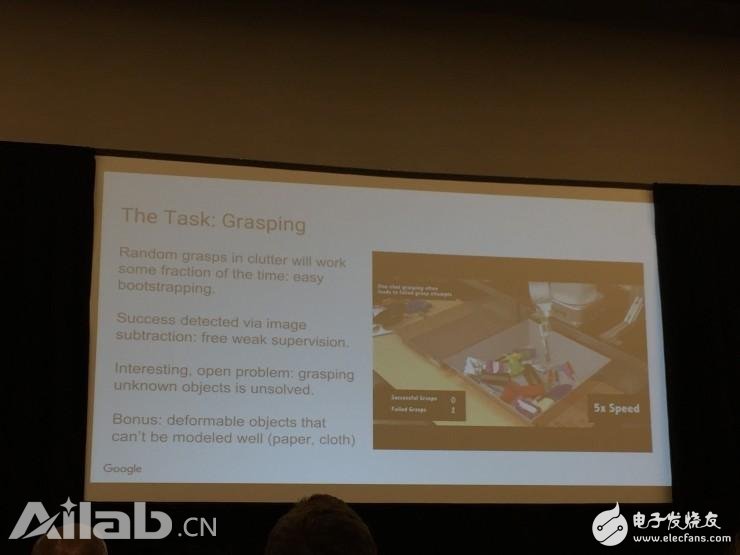
He made a demonstration, let the pen in his hand fall to the ground, saying that if the task of the robot is to grab the pen, then it can't grasp and can't grasp, and there is no difference in the movement of the robot from the outside (by: Therefore, you can't get any rules from it.)
The machine grabs a specific object and there is traceability. Grasping an unknown object cannot be solved. (Vanhoucke broadcasted a video of a robot wrestling highlight, saying that in the past he felt that these robots were very funny when they wrestled, but after they started working on a robot project, they couldn’t smile anymore. It’s really hard to learn the machine. But he is very enjoy.)
The less image recognition technology is involved, the better the machine's robustness can handle more complex objects. When there were listeners asking about the database of the objects, Vanhoucke said that they didn't want to build such a knowledge map.
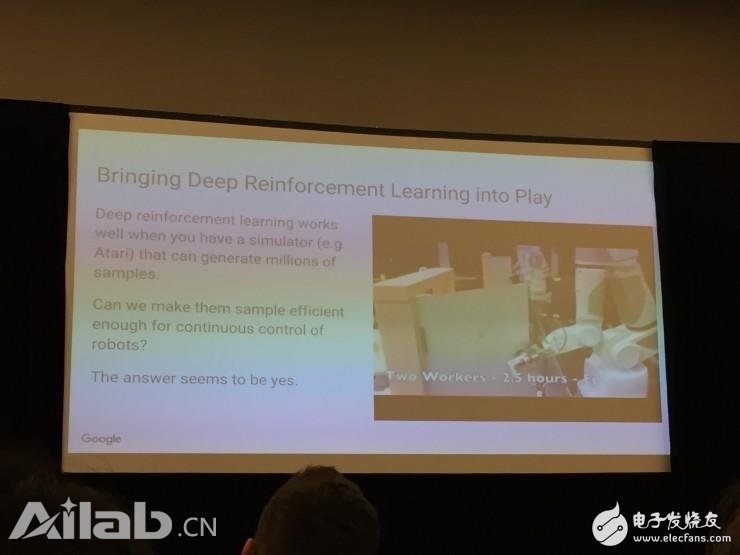
The introduction of reinforcement learning may be helpful for the study of robots, provided that there is a reference model that produces a large number of samples.
Final conclusion:
1. RoboTIcs and machine learning are making interesting integrations;
2. For the conventional roboTIcs problem, there must be awareness of making different answers;
3, It hits all the right difficult problems on the road to pracTIcal AI.
1. Excellent anti-PID performance to ensure stability of the module power
2. 5%-20% power gain from rear side at suitable installation
3. High conversion efficiency, average cell efficiency (front side) is 21.6%, highest efficiency is 22.4%
4. Long term efficiency, stability and excellent reliability
5. Low breakage rate and Low LID rate
6. Good color uniformity
Mono Solar Cell,Solar Power Cell,Silicon Solar Cell,Solar Cell Efficiency
Wuxi Sunket New Energy Technology Co.,Ltd , https://www.sunketsolar.com