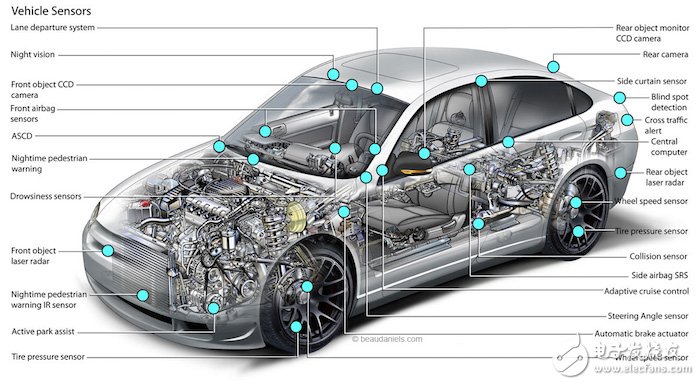
With the development of automotive autonomous driving technology, the demand for MEMS sensors is also growing rapidly. These sensors are applied to the safety and performance related fields of automobiles. This paper will introduce laser radar and visual image sensors which are very important for autonomous driving.
Market research firm IHS Markit expects the market size in this sector to be US$2.8 billion in 2016. From 2015 to 2022, the compound annual growth rate of the MEMS market for automotive applications will reach 6.9%, and will increase to US$3.2 billion in 2022.

In the past few years, MEMS sensors have gained a stable market in mandatory safety systems, such as electronic stability control systems and tire pressure monitoring systems, which have gained popularity in new cars during 2015. Benefiting MEMS suppliers include gyroscopes, pressure sensors, accelerometers, and front and side airbag sensors. In addition, MEMS devices for automotive engine applications are also growing steadily, mainly due to increasing engine management and exhaust gas processing applications. According to the news from Memes, MEMS shipments in these areas will reach 1.34 billion by 2019, compared with 1.08 billion in 2013.
The LiDAR system uses a rotating laser beam. This technology is used in the unmanned test vehicles of BMW, Google, Nissan and Apple. But if you want to apply it on a production car, the price must drop dramatically. It is widely believed in the industry that this goal can be achieved in a few years.
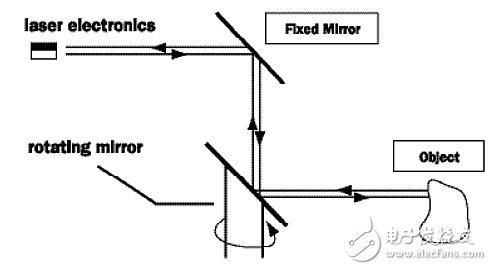
How Lidar works (picture from Velodyne)
Lidar works by transmitting and receiving a laser beam. Inside it, each set of components contains a transmitting unit and a receiving unit. The Velodyne above uses a rotating mirror design.
The set of transmitting/receiving components and the rotating mirror combine to scan at least one plane. The mirror not only reflects the light emitted by the diode, but also reflects the reflected light back to the receiver. By rotating the mirror, a viewing angle of 90 to 180 degrees can be achieved, and the complexity of system design and manufacturing is greatly reduced because the mirror is the only motion mechanism in it.
Pulsed light was previously used to detect distance. The principle of detecting the distance is based on the time when the light returns. The laser diode emits pulsed light. After the pulsed light is irradiated onto the target, a part of the light is reflected back. A photon detector is installed near the diode, which can detect the returned signal and transmit it by calculation. The time difference from the detection can be used to calculate the distance of the target. Once the pulse distance measurement system is activated, a large number of point clouds can be collected.
If there is a target in the point cloud, the target will appear a shadow in the point cloud. Through this shadow, the distance and size of the target can be measured. A 3D image of the surrounding environment can be generated by the point cloud. The higher the point cloud density, the clearer the image.
Visual image sensorA very wide-ranging application now combines 2D laser radar with vision sensors, but the low-cost nature of vision sensors makes them an indispensable part of autonomous driving solutions.
The image recognition technology of the visual sensor senses the surrounding environment. For the automatic driving, in addition to knowing what objects/pedests exist at any position, and in addition to the function of the vehicle issuing a deceleration brake to avoid an accident, Based on image recognition, you can understand the current driving scene and learn to deal with emergencies.
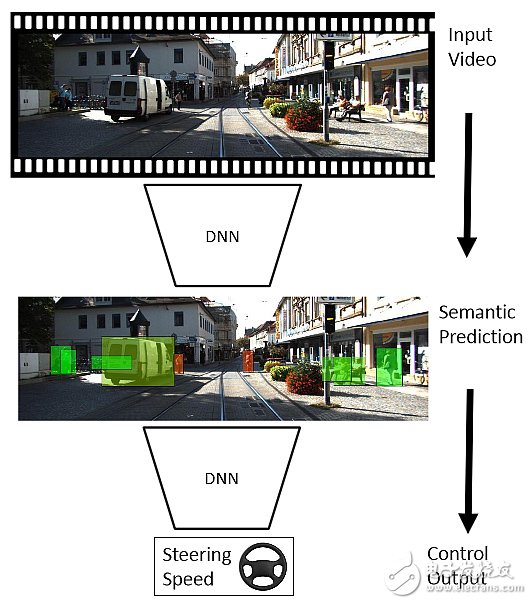
Vision Sensor Workflow If the difficulty of lidar is how to make its performance meet the needs of autonomous navigation, then the difficulty of the camera lies in the process from perception to cognition.
In the analogy of the human eye, after seeing a pedestrian or a vehicle, the human driver will prejudge the next action of the pedestrian or the vehicle based on the sight seen, and control the vehicle according to the pre-judgment. Autonomous vehicles also need this "pre-judgment" process, and the camera plays an observation role. Self-driving cars must be able to observe, understand, model, analyze, and predict the behavior of people inside the car, outsiders, and people in the car.
Tempered Glass Screen Protector
Tempered Glass Screen Protector,9H Tempered glass Film,Glass screen protector,Premium Tempered Glass 9H Screen Protector
Guangdong Magic Electronic Limited , https://www.magicmax.cc