1. ABB robots support multitasking (up to one motion task per robot body).
2. Use multitasking, robots have 623-1 mulTItasking options
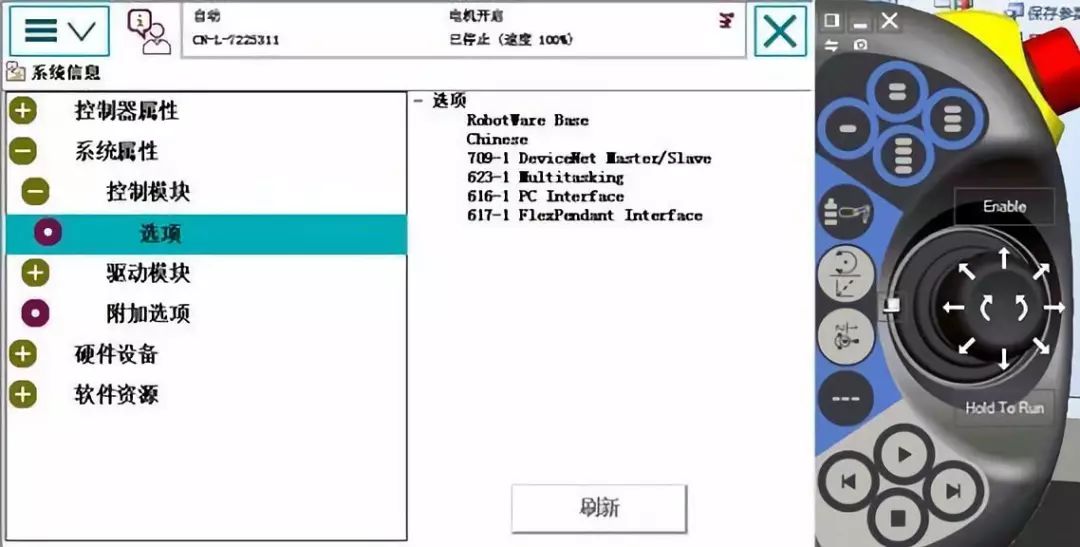
3. How to create multiple tasks?
4. Control panel, configuration
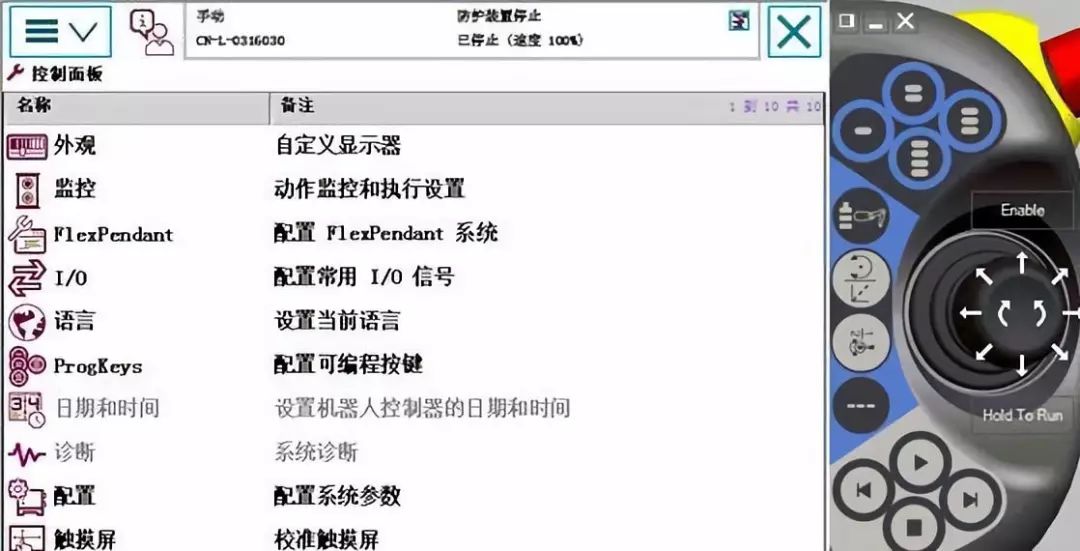
5. Theme controller
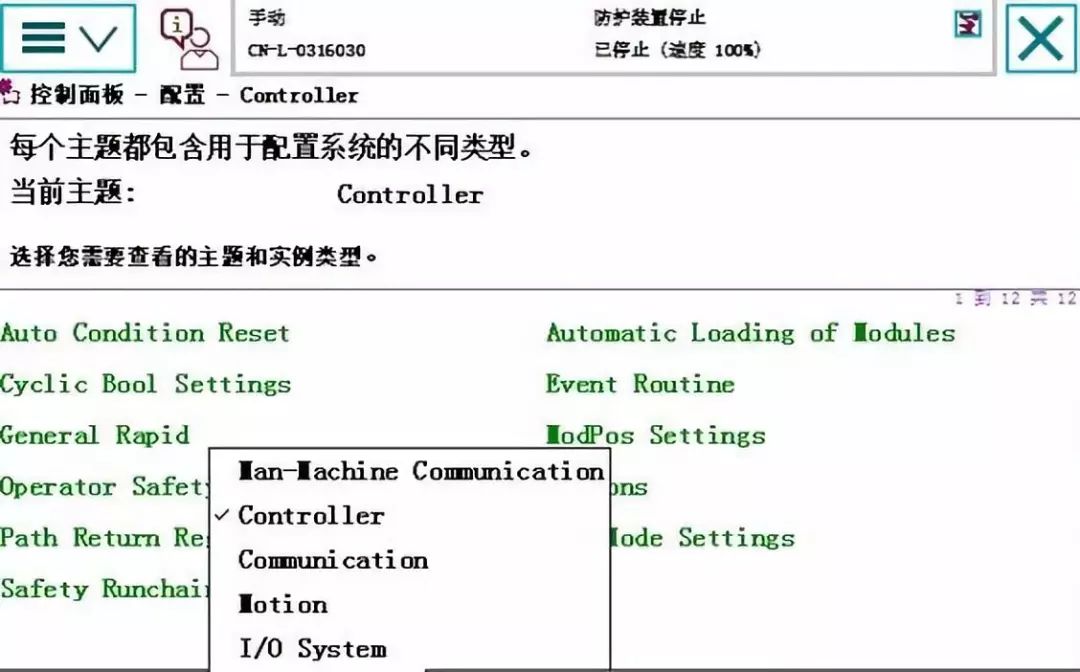
6. Enter the task, create a new one

This time should be set to normal, otherwise it can not be programmed, all program debugging, and then set back semi stacc can start automatically.
7. Restart
8. The program editor enters t2 task.

9. How to transmit data between multiple tasks? The following example uses the amount of flag1 transmitted between tasks (ie, any one task changes the value of flag1, and the value of another task flag1 is also modified).
10. The foreground and background must build data. The storage type must be variable, the same type, the same name, such as:
Pers bool flag1
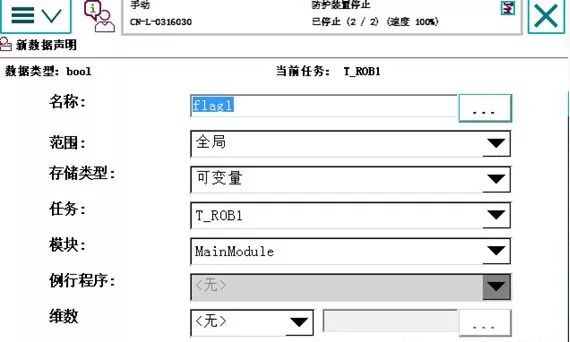

That is, there must be this flag1 in both tasks and it must be variable.
11. In t2, the code is as follows
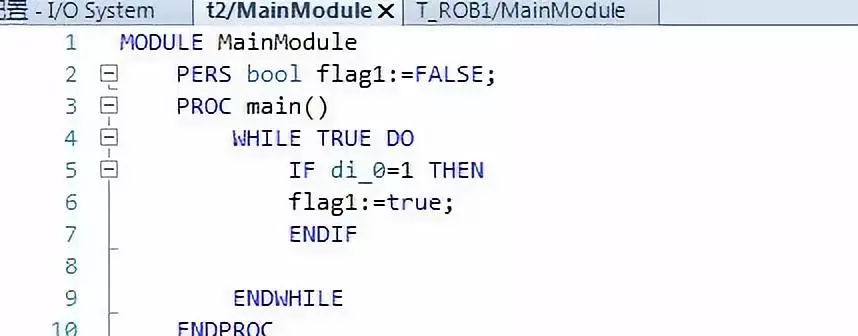
12. The foreground task code is as follows
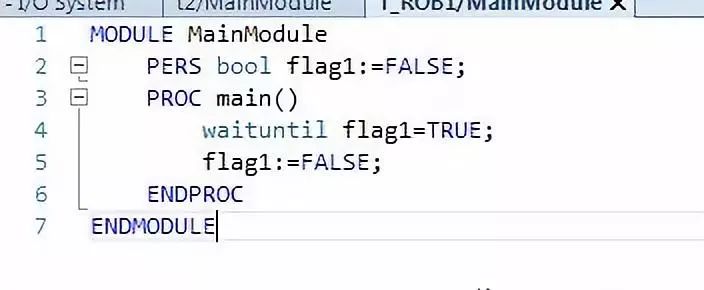
Above can realize the background task real-time scanning di_0 signal, if di_0 signal changes 1, flag1 is true. According to the logic, the foreground waits for flag1 to be true. After executing waitunTIl, set flag1 to false
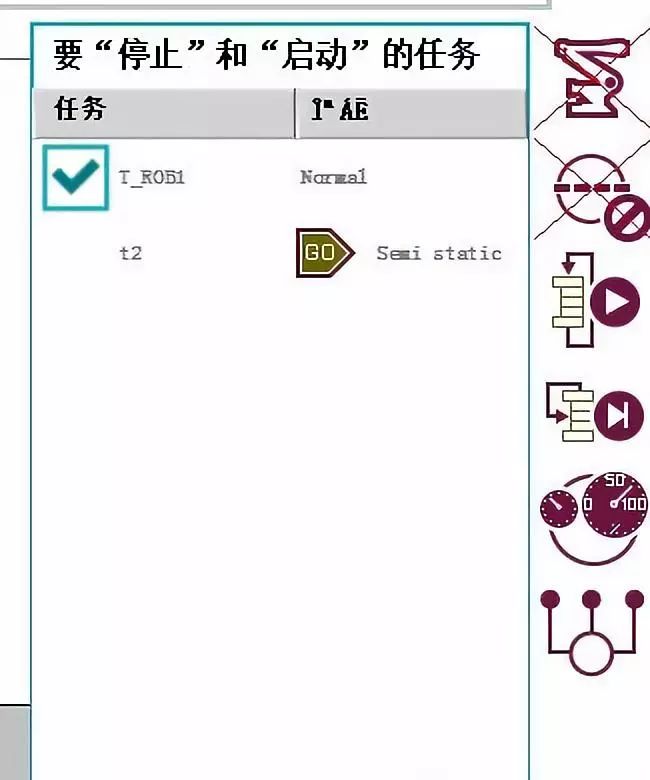
13. How to run?
The bottom right corner of the Teach Pendant opens. Make sure that both tasks are ticked and then run. You can test it.

14. Test no problem, enter the configuration interface, change t2 to semi stacc, restart, this time t2 can not be selected, has been switched on automatically.

Floor Display,Floor-Standing Lcd Display,Floor Standing Pop Up Display,Floor Advertising Screen Display
Kindwin Technology (H.K.) Limited , https://www.szktlled.com