I. INTRODUCTION With the rapid development of China's economy, the elevator market is extremely prosperous, with an annual demand of more than 40,000 units, making it the most active market in the world. Since elevators in China are greatly affected by Japanese products, people are increasingly demanding elevator comfort. How to improve the comfort of elevator operation has become an important issue for all elevator manufacturers.
Second, the selection of high quality, stable traction machine elevator control system should first be said to be a mechanical system. Elevator operation is the reciprocating mechanical movement of the car on the guide rail. Due to its manned function, it puts more stringent requirements on its reliability, vibration noise and comfort. The reliability of the elevator machinery is fully guaranteed by the mechanical design and material selection. The mechanical vibration of the car in the x and y directions is completely guaranteed by the installation of the guide rail and the machining accuracy and quality of the guide shoe, and the mechanical vibration in the z direction is closely related to the traction machine and its drive motor and frequency converter. The traction machine is the driving device for the elevator running, and its performance is directly related to the comfort of the elevator running. The influence of the mechanical clearance of the traction machine on the elevator is mainly reflected in the acceleration and deceleration of the elevator. When the motor speed changes, the electric operation and the power generation operation state will switch, causing the vibration of the elevator, which greatly affects the comfort of the elevator. . In the process of acceleration and deceleration of the elevator s curve, there is usually one or two significant weight loss or overweight feeling, and the accompanying machine emits an abnormal sound. In addition, for some modified two-speed old ladder traction machines, due to the huge impact of multiple high and low speed switching, the rubber gasket in the connecting sleeve shaft is seriously worn, which also causes the above phenomenon. Therefore, the elevator manufacturer must make clear requirements for the clearance of the newly selected traction machine, and regularly check the wear of the connecting shaft during maintenance. In addition, the internal gear of the traction machine or the turbine vortex is poorly processed and installed, and the dynamic balance is not well adjusted, which may cause the elevator to generate vibration and noise at high speed. I once found in a certain manufacturer that the vertical vibration of the elevator operation is particularly large. When all methods are invalid, it is suspected that the problem is the traction machine. The manufacturer does not believe that the replacement of all the brand inverters on the market has not improved. The traction machine, the problem is solved. The problem is that the manufacturer of the traction machine is small in scale, the detection method is backward, and the production of the traction machine is difficult to ensure consistency, causing significant direct and indirect losses to the elevator factory. Therefore, the choice of the traction machine can not be cheap, and must choose a manufacturer with strong technical strength, complete testing means and sound quality assurance system. Another point to emphasize is that in the case of the same speed, it is better to choose a traction machine with a large reduction ratio of the traction machine. Because the reduction ratio is large, the resulting slippage phenomenon is small, and the starting comfort is easy to adjust. Practice has proved that, at the same ladder speed, the 6-pole motor traction machine has a lower starting comfort than the 4-pole motor. The essential reason is that the 6-pole motor is not more than 1.5 times larger than the 4-pole motor.
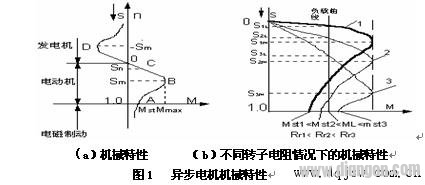
Third, the selection of high-quality drive motor on the premise of ensuring the quality of the traction machine, the performance of the motor matched with the traction machine is also directly related to the performance of the elevator braking process, the problem is mainly the performance of the start comfort . If the starting torque of the motor is large, the slippage generated at the moment when the elevator is released will be small. At present, in the manuals of many inverters, there are serious misleading statements. The inverter can achieve a starting torque of 200% or more, which is practically meaningless. If the design start torque and maximum torque of a motor are small, the inverter will not be able to generate large output torque, and it will easily generate speed fluctuations and cause oscillation. According to the basic knowledge of asynchronous motor, the mn curve of the motor is shown in Fig. 1(a). In the figure, point a is the initial starting torque point, point b is the maximum torque point, and point c is the rated working point. The starting torque of the motor is related to the slip s of the motor, the slip is large, the initial starting torque is large, and the slip is required to be increased, the rotor resistance is required to be large, and the rotor inductance is small, and FIG. 1(b) shows that the rotor resistance is different. Mechanical characteristic curve in the case. It can also be seen from the figure that as the rotor resistance increases, the maximum torque does not change, but the corresponding maximum slip increases, and the slip increases under the same load. This is why imported brand elevators use high-slip motors. However, many imported brand traction machines are equipped with domestic low-slip motors in order to reduce costs. The slip frequency is generally less than 2.5hz, and its starting performance is greatly reduced. Therefore, when choosing the traction machine brand, the choice of the brand and performance of the matching motor is equally important.
Fourth, the selection of high-performance inverter asynchronous motor vector control is based on the vector control of the motor parameters, so the motor parameters must be able to learn automatically. Otherwise, superior performance is not achieved. Therefore, you must first select a frequency converter that can self-learn the motor parameters. Secondly, the inverter must have a torque output of more than 150% at zero speed to ensure good starting and parking comfort. In addition, it requires a very good overload capacity, 110% of the rated load, must be continuously running, especially for high-rise elevators, which need to run at full load for more than 30s, and this should be considered. Some foreign manufacturers' inverters, 100% rated load, can't run for 60s continuously. Therefore, when used for high-rise elevator control, it is recommended to use one file for amplification, which causes unnecessary economic loss to the user.
After selecting the inverter, it is necessary to have a good comfort. The key is to debug the performance and running curve of the inverter. When the elevator is started, due to the relatively large static friction of the mechanical guide shoe, it can be eliminated by adjusting the starting speed and the starting speed holding time. In addition, the general frequency converter has a speed loop pi parameter adjustment function, which can effectively adjust the dynamic response speed and steady speed precision of the frequency converter through the speed loop pi parameter adjustment, and can improve the comfort of the elevator starting and steady state operation. The starting performance is related to the low frequency pi parameter. The low frequency i can be set to zero or a relatively large value first. The kp is adjusted without considering the leveling accuracy, the kp is increased, the low frequency dynamic response is accelerated, and the starting torque is large, but the kp is too Large, easy to cause oscillation, the comfort of starting and stopping crawling will be worse. Therefore, it is necessary to increase kp to the elevator in the case of full load and no load, and the oscillation is not critical, and then the i parameter can be gradually reduced to achieve satisfactory results of starting and crawling. The high-frequency pi parameter adjustment principle is to ensure that the overshoot of the start acceleration and the stop deceleration process is minimum, generally less than 2% of the rated speed, and the speed accuracy under the steady speed condition is generally ensured, generally not exceeding 0.001 m/s. First set the high frequency i to zero or a relatively large value, adjust k, make the parameter smaller than the critical parameter that the elevator generates oscillation at high frequency steady state, and then gradually reduce i, so that the overshoot reaches the required index. For the case of using the same traction machine and machinery, copying can be achieved by copying the keyboard parameters while adjusting one elevator. In the above, the unit of the integral time constant i is the time unit s. Special reminder is that most of the inverter pi parameters on the market are adjusted by two independent numbers. There is no actual physical quantity concept. The larger i is, the smaller the time constant is.
For the comfort during acceleration and deceleration, it should be solved by s curve adjustment. Generally, the acceleration and deceleration are between 0.5 and 1. The rapid acceleration at the beginning and the rapid deceleration at the end can be adjusted to 0.25~0.5. The sudden acceleration at the end and the rapid deceleration at the beginning can be between 0.5 and 0.9. The adjustment of the s curve is also related to the place of the elevator. For the occasions where the hospital, the nursing home, etc. have high requirements for comfort, it is necessary to reduce the corresponding parameters. For occasions requiring high efficiency such as office writing, the corresponding parameters may be appropriately increased. The sudden acceleration of the end section and the increase of the sudden deceleration of the starting section are beneficial to overcome the jitter of the acceleration and deceleration process caused by the gap.
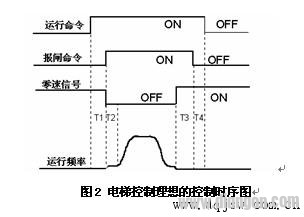
Fifth, the best control timing using the optimal control timing As shown in Figure 2, after receiving the running command, the inverter enters the zero-speed running process, delaying t1 to ensure that the motor excitation reaches the steady state and then opens the brake, and at the same time the frequency conversion The start speed of the start speed of the start-up speed is high speed and low speed to zero speed after t2. After zero speed operation t3, when the inertia effect is guaranteed to be zero, the brake is closed, and it takes a certain time because the brake is tight. The run command must be undone after t4 has been delayed. According to this sequence, it is guaranteed that the start and stop have the ideal comfort. In Emerson td3100 inverter, t1 is set by f7.00, t2 is set by f3.01, t3 is set by f7.01, t4 is determined by control, if the controller delay time is not enough, td3100 inverter will automatically extend the command. Keep time.
Sixth, other
1, start compensation
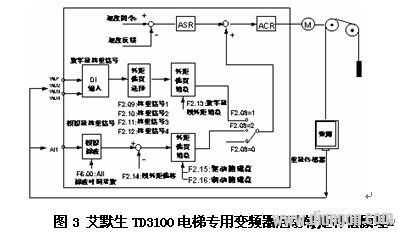
For medium and low speed elevators below 1.75m/s, due to the low running speed, it is basically not necessary to start compensation to achieve a satisfactory level. For medium and high-speed elevators of 1.75 m/s or more, if the starting comfort requirement is relatively high, it is necessary to add a weighing device to compensate for the starting torque. There are generally two types of weighing devices, switching quantity detection and analog quantity detection. For the switch quantity detection, it has low cost, but it can only be leveled. Generally, 4 switches are installed, which can achieve accurate compensation of any 4 points between no load and full load. However, due to the level compensation, it can not be done. The degree of ideality. The analog sensor can realize stepless compensation, but the problem is that the analog sensor often shifts with the use of the elevator, and the output will be offset, resulting in compensation error. The effect is sometimes worse than the uncompensated, so the compensation gain is required periodically. Make adjustments. Emerson td3100 elevator dedicated inverter starting torque compensation principle as shown
2. Reasonable selection of damper and wire rope
Many elevator manufacturers have very random choices for shock absorbers. In fact, the damper plays a very important role in improving the comfort of the elevator. The damper generally has three kinds of rubber damping pads of the traction machine base, a damping spring or a rubber damping pad at the bottom of the car, and a wire rope damper at the top of the car. The quality of the damping pad of the traction machine base and the vibration damping effect vary widely. It directly affects the comfort of the elevator. Especially when the elevator goes up to the top 2 to 4 floor to start and stop, the problem will be abnormal. The quality of the damper at the bottom of the car will directly affect the stability of the steady-state operation of the elevator. If the modulus of elasticity is large and the characteristics are too hard, it will not be able to reduce the vibration, and high-frequency vibration will occur, and the human body will feel the hemp. The feeling, when severe, will cause high frequency vibration of the car, resulting in relatively large noise. On the contrary, low frequency oscillation will occur, causing the sinking feeling of the human body. Therefore, it must be rationally selected. The vibration damping effect of the steel wire rope is the same as that of the damper at the bottom of the car. The steel wire rope with reasonable elastic coefficient must be selected according to the height of the floor. Under the condition of ensuring full load, the expansion and contraction amount meets the requirements, and a good vibration damping effect is achieved. In addition, in the high-rise elevator, since the wire rope is long and the degree of tightness is poor, it is easy to cause the wire rope to oscillate at high speed, and the collision of the car causes the vibration of the car. An effective method is to add a wire rope damper at the end of the wire rope to effectively absorb the vibration wave of the wire rope and prevent reflection from forming a beat phenomenon.
3. Reasonable selection of encoder
The encoder is a necessary component for the closed loop of the elevator frequency converter, and its reasonable selection has a major impact on the safe and reliable operation of the elevator. The bushing type is more reliable from the installation method, but the price is relatively expensive compared to the shaft type. At present, many manufacturers of coupling encoders are used. Because the standard couplings are easy to break under the condition of poor coaxiality and the reliability is very poor, they use a very simple connection method to bring safety to the operation of the elevator. Hidden dangers. From the wiring method, there are push-pull output and open collector output. It is recommended to use open collector encoder when the encoder connection exceeds 5m to improve the anti-interference ability.
The number of pulses per revolution of the encoder is generally above 300 to ensure the normal operation of the inverter. It is recommended to increase the number of pulses per revolution of the encoder to 1000 to 2000 when the cost permits, which can greatly improve the starting comfort of the elevator. sense. The reason is that the larger the number of pulses per revolution, the easier to achieve rapid detection when starting the rolling, so as to achieve rapid torque adjustment and reduce rolling.
4. In the reasonable grounding elevator control system of the control system, grounding is a key issue affecting reliability. Due to the non-standard power supply in China, most of the occasions are three-phase four-wire system instead of three-phase five-wire system. The grounding problem has become more prominent. When installing and commissioning, first ensure that the control cabinet, traction machine and car are reliably grounded or zero, and then the encoder is grounded. However, it should be emphasized that the encoders on the market are currently less standardized, and some encoders have poor anti-interference ability. The manufacturer has connected the shield of the encoder leads to the encoder housing, which is a very serious error. If the user connects the encoder shielding layer to the ground of the inverter, because there is grounding at both ends, there is a potential difference between the inverter and the motor, which is easy to cause interference. The lighter causes low frequency jitter and random overcurrent protection of the elevator. When the on-site traction machine is not grounded or the grounding is poor, the leakage of the motor will cause serious damage to the inverter interface board. Therefore, it is recommended to use an encoder that is not connected to the shield and a grounding point at the far end to greatly improve the reliability of the system.
5. Reasonable selection of braking resistor
The braking resistor is used to consume the feedback energy generated by the elevator during the power generation process. The selection of the resistance value is based on the 100% braking torque of the inverter manual, but the resistance power is directly related to the volume and price. Many manufacturers I don't know how to choose, the inverter resistance of the same power is all the same. This is a serious hidden danger. Because the power of the resistor is related to the height of the floor, a 6-story building and a 30-story building may use 15kw of inverters, but the inverters run continuously for 5 times, and the power needs to be 5 times different. Reliability can be guaranteed and the life of the resistor can be extended. Therefore, the power of the resistor should be calculated first according to the continuous braking, and then the power should be adjusted according to the height of the different floors.
Seven, conclusion
In this paper, for the traction machine, motor, frequency converter and operation debugging, from the electrical and mechanical aspects, some effective countermeasures to improve the comfort during elevator start, acceleration, steady state and deceleration parking operation are proposed. The traction machine manufacturer and the elevator transformation and maintenance manufacturers have certain reference value.
FTTH Cable Installation Accessories
The FTTH Installation Accessories Set concludes junction box, fiber wall socket(also named Single family unit rosette, SFU rosette), draw hooks, cable clamp, cable wall bushings, cable glands, cable clips, tail duct, cable wiring duct, nail clip.
Cable drawing hooks are made of metal stainless steel in accordance with ASTM A307.hanging hardware, hard material, with splint type and C type for option. The conduit box, pipe joint box single gang or double gang are made of PC material, fire retardant.
Applications:
Span Clamp is attached to the messenger wire at mid span to hold the p-clamps with drop wires
Telecommunications subscriber loop
Fiber to the home (FTTH)
LAN/WAN
CATV
Drop Wire Hanging Holder,Drop Wire Hanging Holder,Cable Pole Clamp,Cable Fitting Clamp are available.


Drop Wire Hanging Holder,Drop Wire Hanging Holder,Cable Pole Clamp,Cable Fitting Clamp
Sijee Optical Communication Technology Co.,Ltd , https://www.sijee-optical.com